For a design challenge, I created a robotic leg using capstan drives and pulleys in 2 days.
Requirements
Specifications:
- Extended leg length 0.5m
- Hip and knee continuous torque of 7Nm at 40 rad/s
- Maximize actuator torque density: motor, gearbox, housing
- Minimize leg inertia (distal mass and total mass)
- Off the shelf fastners and components where possible
- Cost – design for cost and manufacturability
- Any type of fabrication method
- High Volume, production capable design
Design Goals
The problem is incredibly open ended and has many possible variations to a solution. My focus will be on distal weight, inertia and focusing on quick motion for running and jumping
This means:
- Potentially using composites
- Using lightweight, high strength alloys
- One actuator for both joints
As a secondary goal, reducing cost and improving power transmission from the motors
- Potentially using a single motor to reduce overall weight
Design Inspiration
Multiple linkage mechanisms could be used to perform the motion, however most seem to be four / five bar linkages
There is potential to use a Jansen mechanism with a single motor, however that increases distal weight and only has one motion, cannot be used for jumping


Deciding the dimensions of the legs, as well as the angles of rotation of both legs depends on the types of gear and actuation mechanism
Generally, the closer the knee linkage is to the hip joint, the better the positional accuracy and less torque. The further away the knee linkage is, the higher the linear speed and strain on actuation system.
Starting from 0.25m, 0.25m for a total length, and optimizing for force, spring and torque from there

Leg Design Ideas
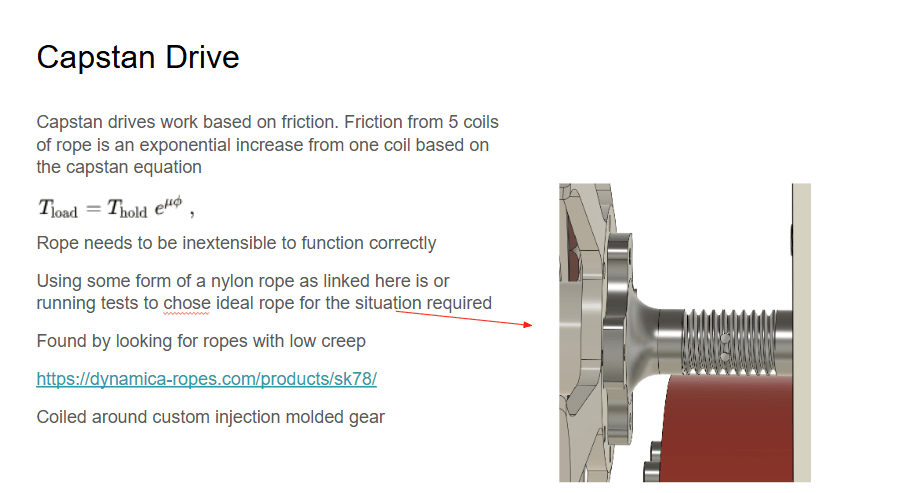
Make joint 1 (thigh) capstan drive driven
Direct gear reduction
Low cost components using nylon or kevlar / polymer wire
Backdriveable and no backlash
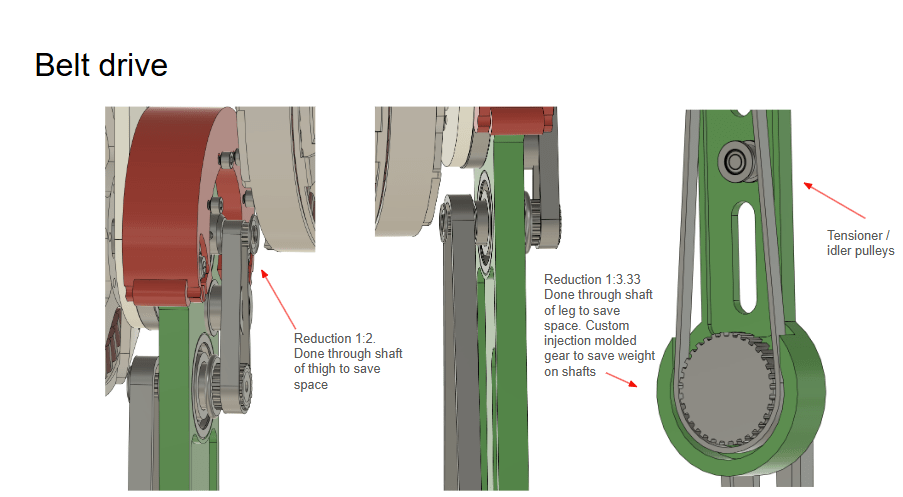
Make joint 2 (knee) belt drive driven
Multiple gear reductions
Low cost and high volume
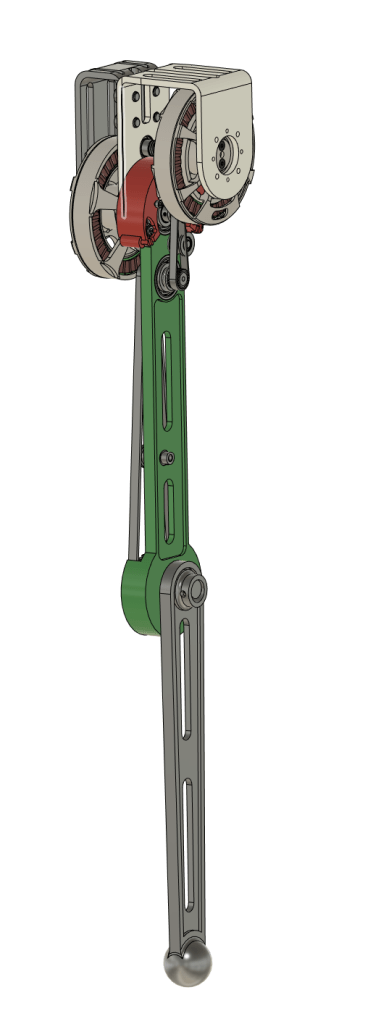
Motor Positioning
Since knee joint is going to be belt driven the motor has to reside on the first link, belts cannot increase in length.
Motors positioned as close together as possible
Bolt together machinable / sheet metal stamped housing units
Top motor drives thigh and lower motor drives knee

Design Points